RK3588S Ubuntu 20.4使用rtk硬件接入差分站进行差分定位
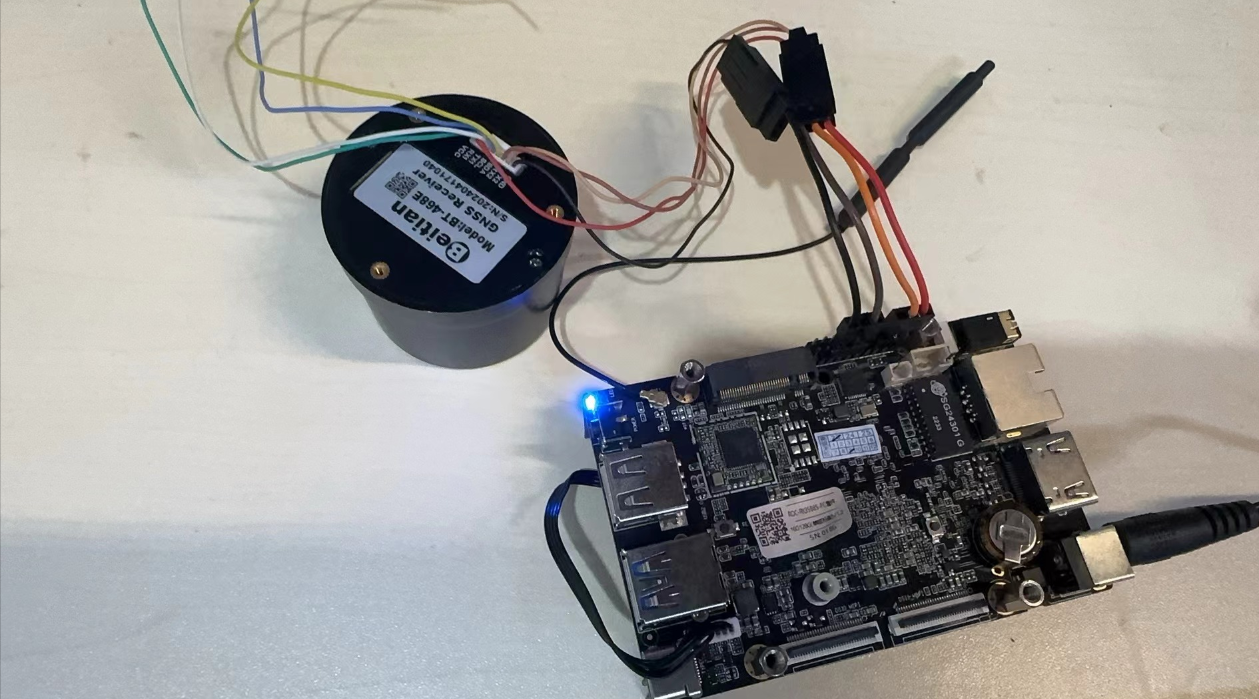
我的RK3588S安装的是ubuntu 20.4,RTK硬件采用的是北天的BT-468E,其余的RTK硬件理论上来说也是同样可行。
一、接线
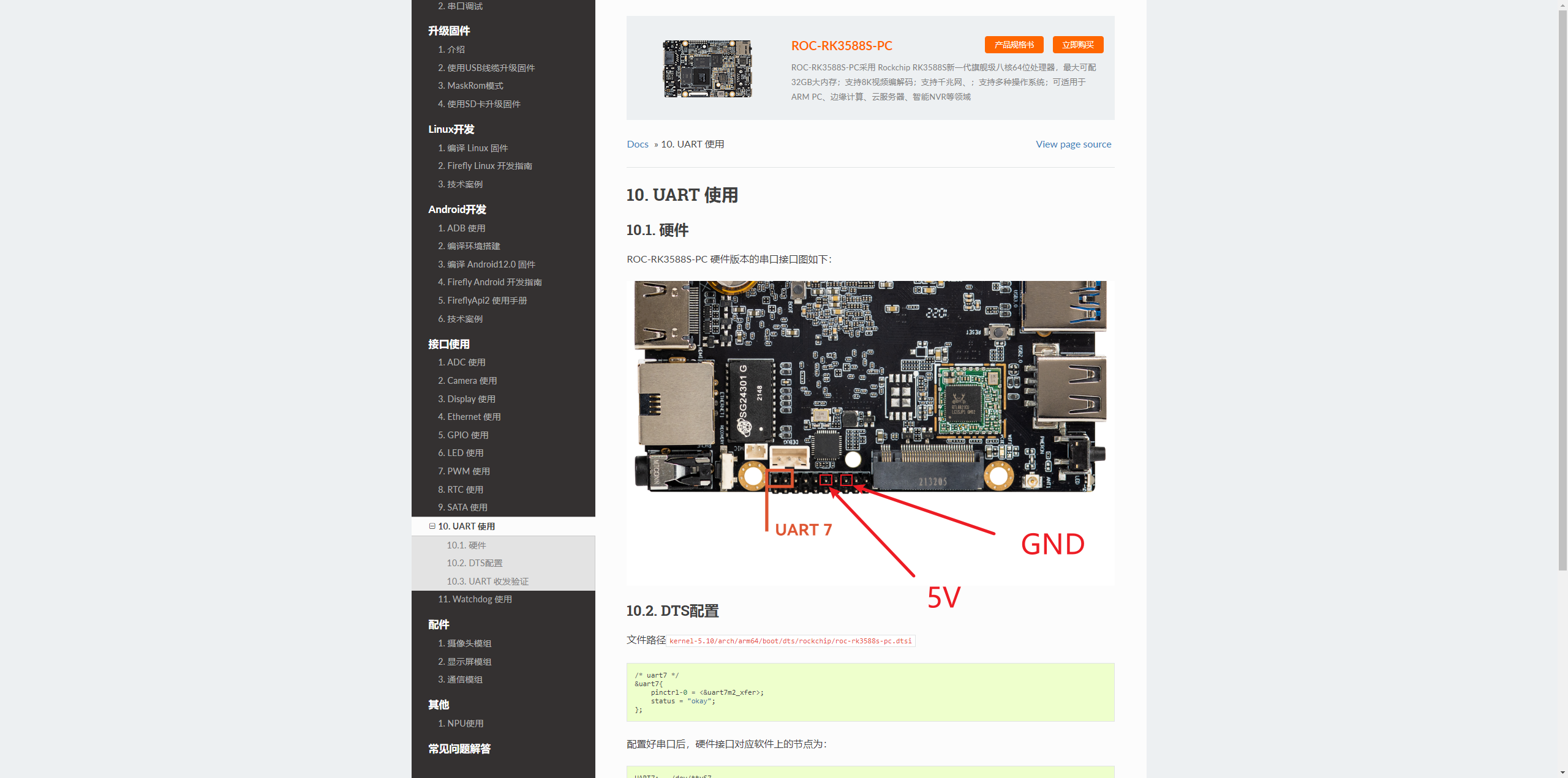
打开开发板的技术手册,其中有rx、tx、5v、GND

对应着RTK技术手册将这四根线对应接入,其中rx、tx是交错连接
接线结果:
二、接通测试
RK3588S有一对UART引脚为UART7,对照着RTK技术手册中UART引脚的波特率115200,将串口的波特率设置成一样:
1
| stty -F /dev/ttyS7 115200
|
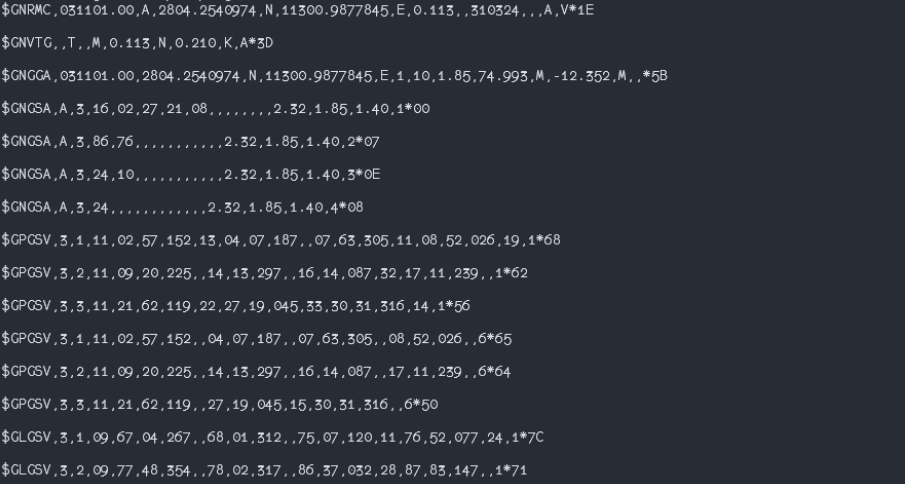
查看串口输出:
可以看到如下输出就说明连接正确了
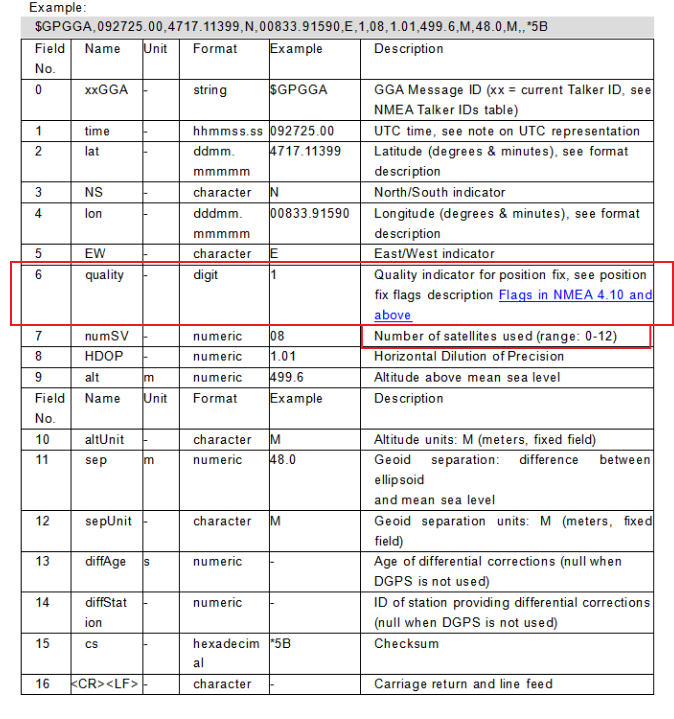
按照协议可以看到GNGGA中的定位质量为单点定位
三、使用RKTLIB库进行差分定位
1.下载RTKLIB库
项目地址:https://github.com/tomojitakasu/RTKLIB
1
| git clone https://github.com/tomojitakasu/RTKLIB.git
|
2.编写程序接入差分站进行差分定位
由于程序涉及到一些纠纷,所以这里只贴关键实现思路的代码,不贴完整程序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
fd = open("/dev/ttyS7", O_RDWR | O_NOCTTY);
if (fd == -1) {
perror("Unable to open serial port");
return 1;
}
speed_t baud_rate = B115200;
struct termios options;
tcgetattr(fd, &options);
cfsetispeed(&options, baud_rate);
cfsetospeed(&options, baud_rate);
options.c_cflag |= (CLOCAL | CREAD);
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
options.c_cflag &= ~CSIZE;
options.c_cflag |= CS8;
options.c_cc[VMIN] = 1;
options.c_cc[VTIME] = 0;
tcsetattr(fd, TCSANOW, &options);
|
1
2
3
4
5
6
7
|
strinit(&monistr);
if(!stropen(&monistr, STR_NTRIPCLI, STR_MODE_RW, "cpef2895:yd148444@120.253.239.161:8002/RTCM33_GRCEJ")){
printf("connet fail...\n");
return 0;
}
|
这里的cpef2895:yd148444@120.253.239.161:8002/RTCM33_GRCEJ是你购买的差分信息服务商账号信息,格式为:账号:密码@基站ip:定位类型端口/挂载点
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
char buffer[255];
const char *gga = "GGA";
while(1) {
int nbytes = read(fd, buffer, sizeof(buffer));
if (nbytes > 0) {
buffer[nbytes] = '\0';
if(strstr(buffer, gga) != NULL){
printf("%s\n", buffer);
if(!strwrite(&monistr, buffer, sizeof(buffer))){
printf("strwrite fail!\n");
}
sleepms(1000);
}
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
int fd;
void* threadRead(void* arg) {
int n;
static unsigned char buff[16384];
printf("create read thread\n");
while (1)
{
if (fd == -1)
{
sleepms(500);
continue;
}
n=strread(&monistr,buff,sizeof(buff));
if (n > 0)
{
printf("read size: %d\n", n);
write(fd, buff, sizeof(buff));
memset(buff,0,sizeof(buff));
sleepms(1000);
}
}
return NULL;
}
|
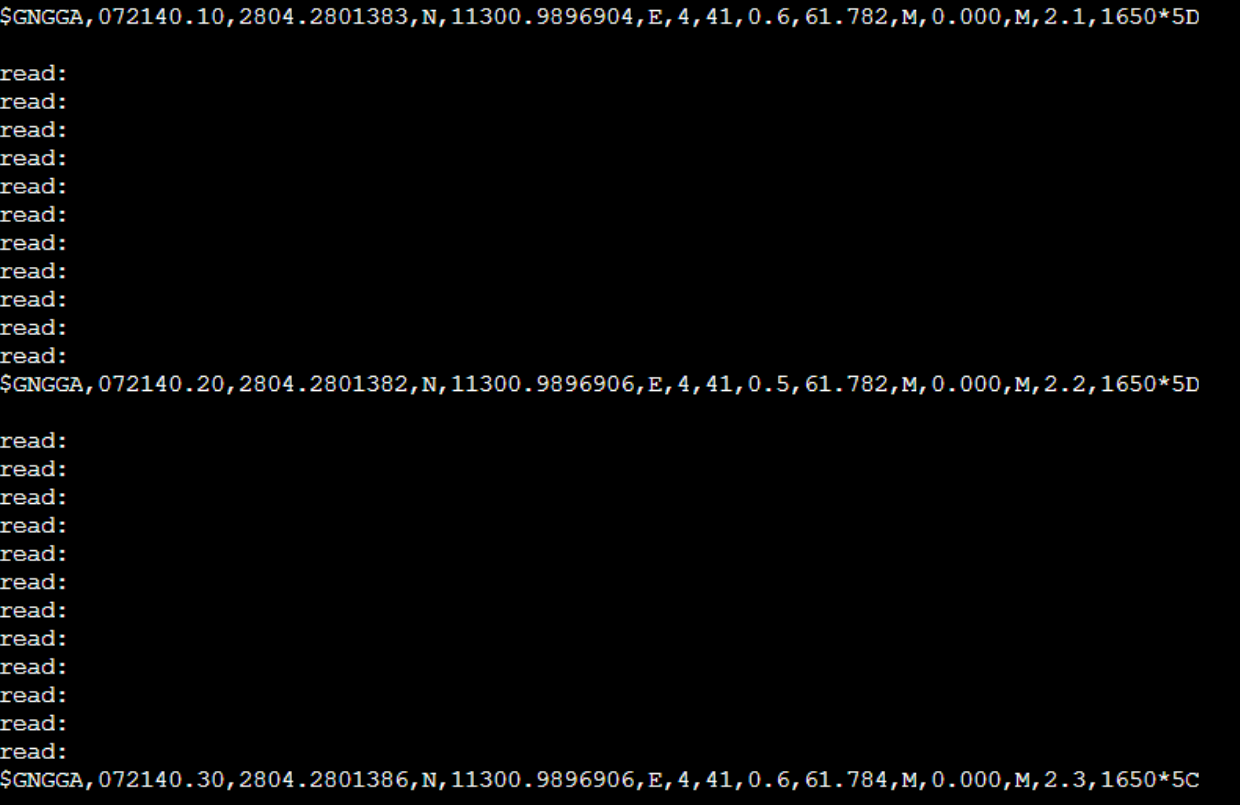
等基站收到模块的定位数据,然后会返回最近站点的差分信息,程序收到差分信息写入到rtk模块中,rtk根据差分信息自动进行差分计算,最终得到厘米级的定位信息,例如下面返回,定位精度为4,代表得到rtk固定解